We are exploring the creation of synthetic agents with human-like reactive behaviours. Such agents have little or no cognitive capacity, but could in future provide the 'look-and-feel' of a truly intelligent agent.
The idea is to learn a stochastic dynamical model of interactive behaviour from the joint motions of individuals observed with a video camera. A synthetic interactive partner is created by prediction from the model and the current history at each timestep.
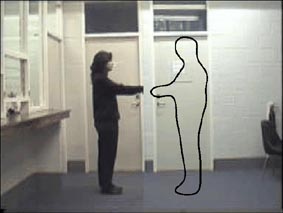
In our first experiments, two individuals shaking hands were observed in side view. A contour was extracted automatically from each profile, and the joint variation of these contours was modelled using a leaky neural network. The following movie(3.7MB) shows a typical synthetic handshake.
Details of this prototype are contained in:
Johnson, N., A. Galata, D. Hogg (1998). The Acquisition and Use of Interaction Behaviour Models. IEEE Computer Vision and Pattern Recognition (CVPR'98), Santa Barbara, IEEE Computer Society Press. pdf
A more general overview of interaction modelling is contained in:
Hogg, D. C., N. Johnson, et al. (1998). Visual Models of Interaction. 2nd International Workshop on Cooperative Distributed Vision, Kyoto, Japan. pdf
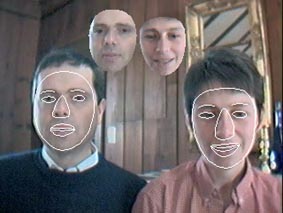
In more recent work, we have modelled the joint 'trajectories' of facial expressions using leaky neural networks and hidden markov models. Faces are tracked using a deformable appearance model, based on work at Manchester University. This type of model may be used for animation as well as visual tracking - an essential property for our purposes. This movie(5.3MB) shows a typical training sequence of someone speaking and another person listening - the aim is to synthesise the listener given only the speaker.

The first step in learning is to track the individual faces in the source video, producing a stream of configuration vectors. The next movie(8.7MB) illustrates this output by shape contours superimposed on each face and by colour facial reconstructions inset into the original sequence.
The final movie(5.1MB) shows a synthetic listener reacting to the speaker depicted on the right. In these preliminary results, the speaker is taken from the same sequence used in training. This behaviour was predicted from a learnt HMM with 20 states. The HMM is constrained to diagonal covariances and is initialised with full connectivity.

Such models may one day reveal previously unknown patterns of interactive behaviour and shed new light on underlying mechanisms. Our current research is harnessing models of facial expression in human-human interaction for the synthesis of a realistic computer-based persona, aimed at improving the human-computer interface. There are many other exciting and un-tried applications for this technology that we wish to explore. For example, detailed models of normal patterns of interaction may be used to make sense of CCTV within security and safety applications, and to synthesise realistic interactions between individuals within an animation.
For more information, contact David Hogg
Maintained by David Hogg
Last updated: 19 July, 2003